Comparison between MC149.01 and Piksi Multi
During the preliminary testing of the MC149.01 receiver, I was curious about checking our receiver against some other NT1065-based device. As far as I know, the most widespread one is the Piksi Multi by Swift Navigation. This is a remarkable ZynQ-based receiver with the best user-software I’ve seen. One of the advantages that we share is the software-defined processing: both the MC149.01 and the Piksi can be further upgraded to process more signals and improve receiver quality.
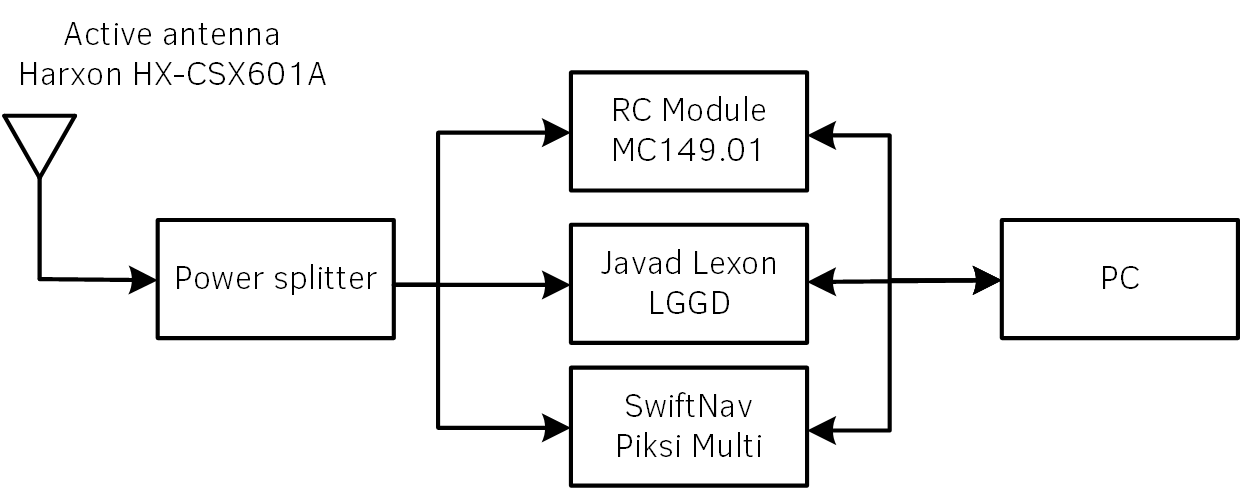
The testing setup is relatively simple: zero-baseline experiment with three receivers: MC149.01, Piksi Multi and the Javad Lexon LGGD. PC collected raw binary data from all of the receivers to perform post-processing.
Data processing consisted of three steps, all of them are performed in the RTKLib toolkit:
- Convert binary log-files to RINEX;
- Standalone post-processing;
- RTK post-processing with observations from the base station.
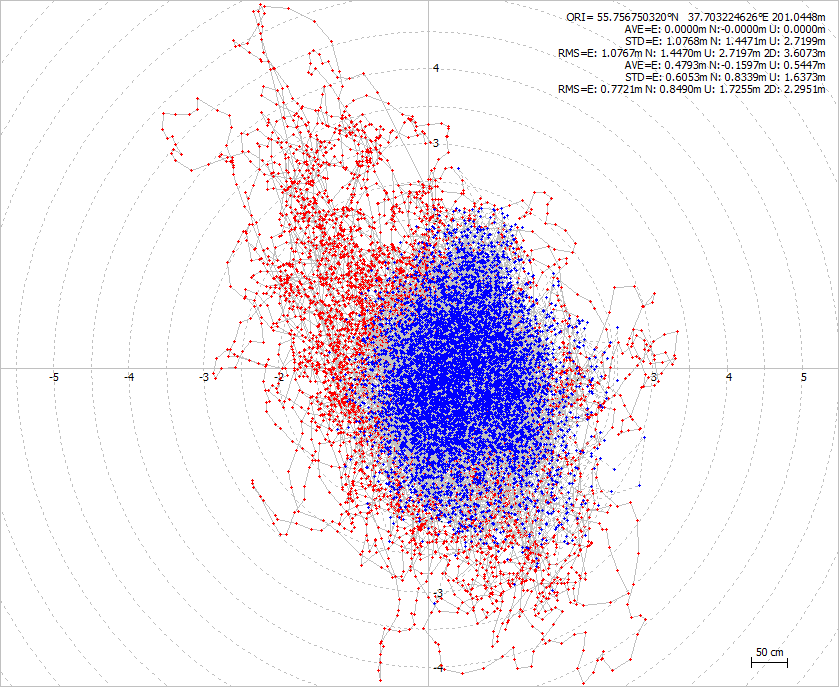
This test has revealed the increased code-measurement noise (correlator spacing problem, which I’ll describe in the following article), which lead to the poorer standalone solution.
Here red graph represents the MC149.01 and the blue one is the Piksi.
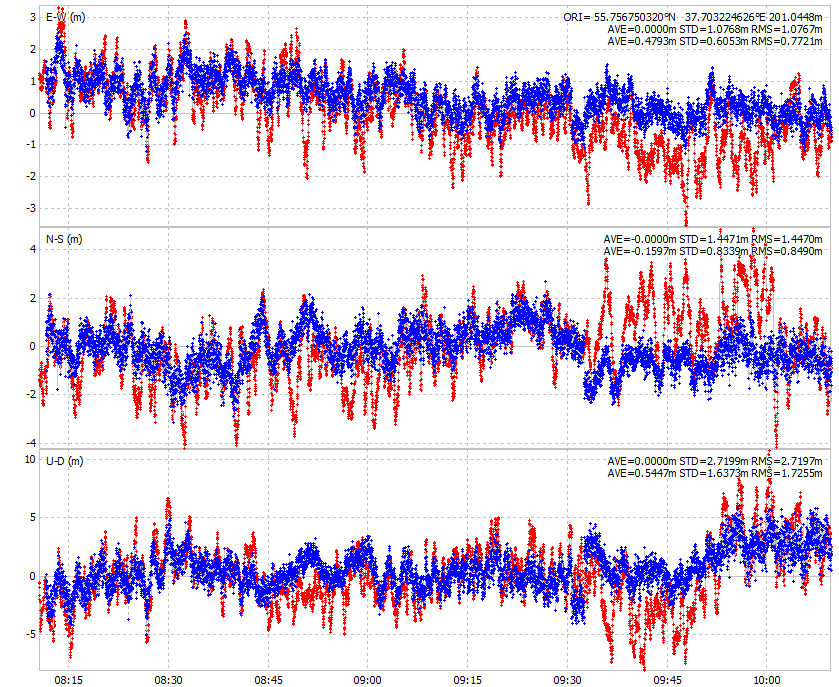
This error was fixed and gave us the standard deviation decrease of about 0.5-0.7 meters in the standalone positioning.
Now let’s check the RTK. Green is the MC149.01, navy is for the Piksi.
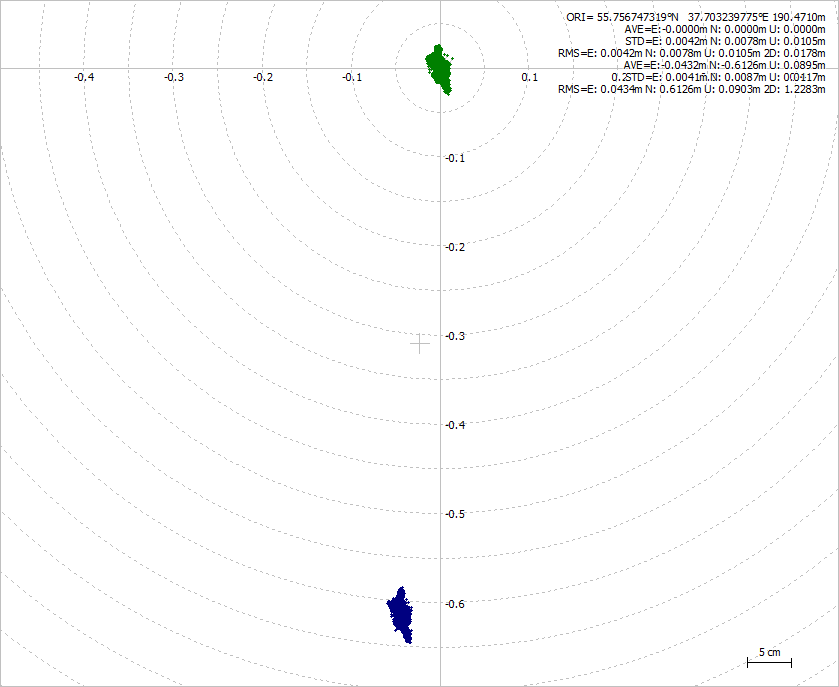
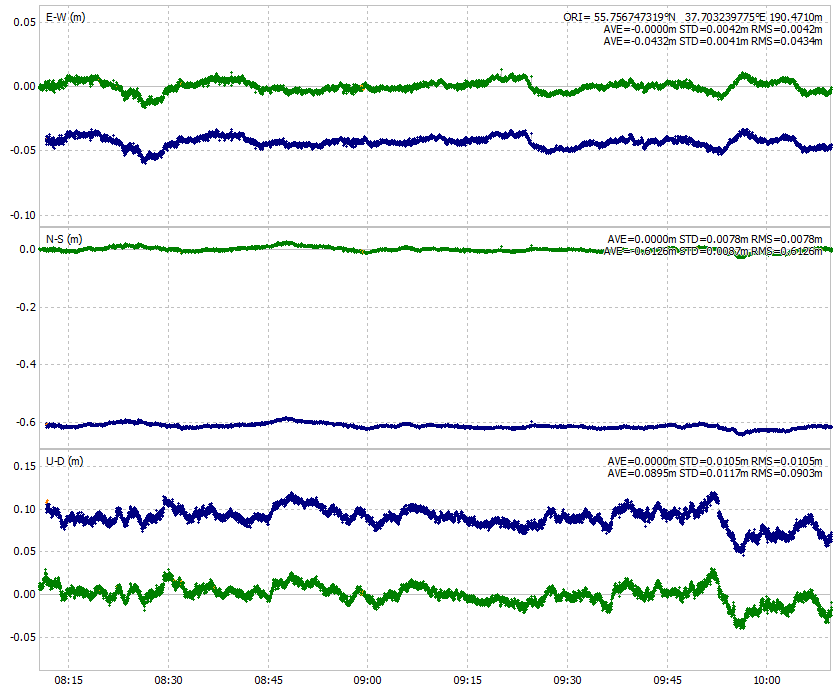
Now that is interesting. Because of the identical front-ends, tracks look almost the same.
Below is the RTK precision table:
| МС149.01 | Piksi Multi | Lexon LGGD | |
|---|---|---|---|
| Latitude STD, mm | 4.2 | 4.1 | 4.6 |
| Longitude STD, mm | 7.8 | 8.7 | 9.6 |
| Altitude STD, mm | 10.5 | 11.7 | 10.3 |
To check the raw measurements quality I’ve calculated the statistical characteristics of the pseudophase measurements for the GPS and the GLONASS L1/L2 signals, presented in the table below:
| МС149.01 - Piksi | МС149.01 - Javad | Piksi - Javad | |
|---|---|---|---|
| GPS L1 phase STD, cycles | 0.0047 | 0.01 | 0.008 |
| GLONASS L1 phase STD, cycles | 0.0103 | 0.0115 | 0.0107 |
| GPS L2 phase STD, cycles | 0.0093 | 0.013 | 0.013 |
| GLONASS L2 phase STD, cycles | 0.0106 | 0.0112 | 0.011 |